
埋在地下的地雷对人的生命造成威胁。人工探测和清除这些地雷是一项危险的任务,有时可能会造成事故。在这种情况下,机器人帮助探测地雷。不仅是地雷,这些机器人还可以用来探测地面上的任何其他金属。这篇文章解释了使用射频技术的金属探测机器人。在了解这种金属探测机器人车辆之前,先了解一下金属探测仪的电路工作原理。
无线金属探测机器人电路原理:
拟议的系统由发射器和接收器电路组成。发射器电路传输操作机器人所需的命令。接收电路通过射频接收这些命令,并根据收到的命令移动机器人。一个金属探测器与接收器一侧的控制器连接。因此,每当检测到任何金属时,机器人就会停在那里,蜂鸣器开始响起。
无线金属检测器机器人电路图:
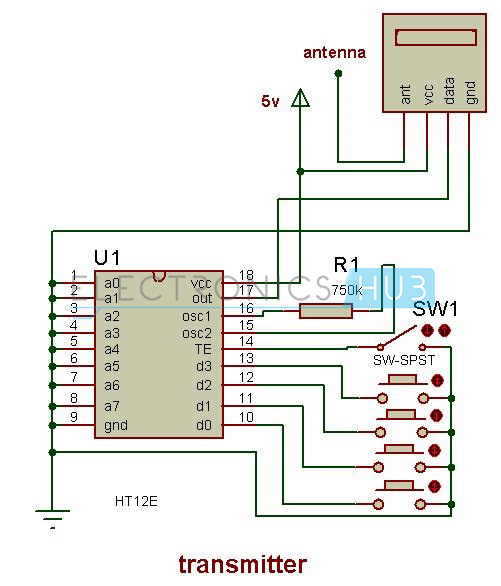
发射器电路:
接收器电路:

电路元件:
硬件组件:
AT89c51微控制器。
射频编码器和解码器
射频发射器和接收器一对。
按钮。
蜂鸣器。
机器人。
L293d
Rs 232电缆。
软件组件:
Keil software
Flash magic
Proteus
使用单片机的金属探测机器人的电路设计:
金属探测机器人项目可以分为几个部分:1)发射器部分,2)接收器部分。
发射器部分由射频编码器、射频发射器和按钮组成。这里使用的射频编码器IC是HT12E,它是一个18针的IC,4位二进制输入通过AD0、AD1、AD2、AD3引脚应用到解码器上。A0-A7是用于安全传输的地址引脚。这些引脚在发射器电路中被连接到地。4位数据被平行地传送到射频发射器。串行地传送到射频接收器。输入是通过按钮给编码器的。射频对的工作频率为434kHz。
接收器部分由AT89c51微控制器、射频解码器、射频接收器、金属探测器、蜂鸣器、L293d集成电路和机器人组成。
收到的数据被应用于射频解码器。这里使用的射频解码器是HT12D。解码后的输入被连接到微控制器的2号端口。四个数据引脚D0-D3连接到端口P2.0-P2.3,解码后的数据被应用到控制机器人运动的微控制器。蜂鸣器连接到端口3.4,当在其路径上检测到任何金属时,蜂鸣器就会响。
金属探测器被连接到微控制器的3.2脚。在这里,金属探测器的位置连接了一个按钮。金属探测器在电路中起主要作用。这里面将有一个振荡器,它产生的交流电通过线圈产生一个交变磁场。当任何金属出现在线圈附近时,会产生磁场,因此可以通过使用另一个线圈来检测磁场的变化。
L293d是一个电机驱动IC。该IC用于驱动电机。L293d内部有h桥。要了解更多关于这个IC的信息,请参考L293d的数据表。
无线金属探测机器人电路工作:
首先用flash magic将代码烧入微控制器。
现在打开电路的电源。
现在用发射器发送命令'1'。
这将被传送到接收器。
在接收端,接收器接收这些命令并根据命令移动机器人。
下面的命令使机器人在指定的方向移动
前进
向后
左转
向右
在机器人移动的过程中,如果在其路径上检测到任何金属,机器人就会停在那里,并发出蜂鸣器。
当发射器发出指令时,它又开始移动。
金属探测器机器人电路算法:
最初,声明端口2为输入,因为它与解码的输入相连。
现在声明端口1为输出,因为机器人的电机引脚连接到端口1上。
启用外部中断。
现在检查端口2的输入。
如果接收到的值等于1,那么将端口值设为0x01,使机器人向前进方向移动。
当中断发生时,使电机的输出引脚为低电平。这写在ISR中。
基于单片机的金属探测机器人应用:
这些机器人被用于探测地雷。
机器人用于检测地面上的矿物。
这些机器人用于检测炸弹。
这些机器人可用于建筑业,定位混凝土中的钢筋。
它们被用于机场和建筑安全,以检测武器。
该电路的局限性:
发射器只能在大约30米的射频范围内操作机器人。