
硬件说明
旋转编码器是用来测量转速的装置,因其人性化的操作被用于越来越多的电子设备中,旋转编码器有多种分类:
关于以上各类编码器的区别,大家自行查阅资料,这里就不多做介绍了。我们STEP-BaseBoard底板上集成的EC11的旋转编码器就属于增量式触电电刷编码器,其工作原理如下:
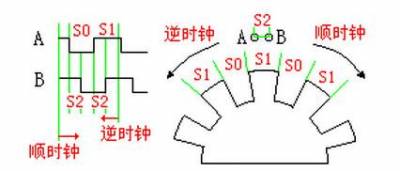
如上图所示,当顺时针旋转时A信号提前B信号90度相位,当逆时针旋转时B信号提前A信号90度相位,FPGA接收到旋转编码器的A、B信号时,可以根据A、B的状态组合判定编码器的旋转方向。程序设计中我们可以对A、B信号检测,检测A信号的边沿及B信号的状态,
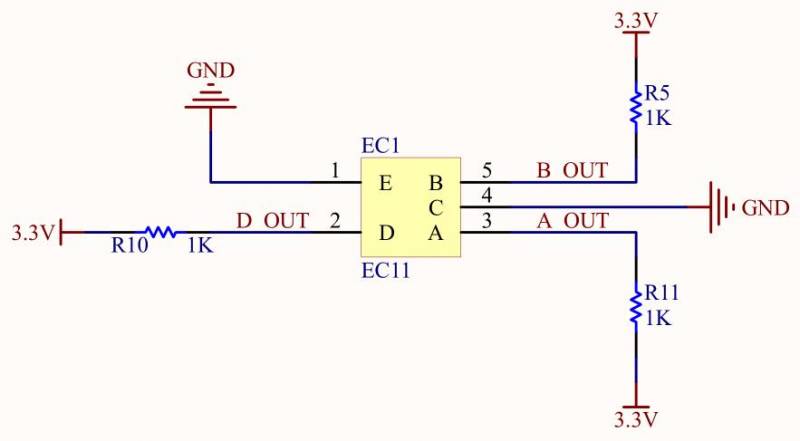
本设计实际电路连接如下:
Verilog代码
//-------------------------------------------------------------------- //>>>>>>>>>>>>>>>>>>>>>>>>>COPYRIGHTNOTICE<<<<<<<<<<<<<<<<<<<<<<<<< //-------------------------------------------------------------------- //Module:Encoder // //Author:Step // //Description:Driverforrotaryencoder //-------------------------------------------------------------------- //CodeRevisionHistory: //-------------------------------------------------------------------- //Version:|Mod.Date:|ChangesMade: //V1.0|2016/04/20|Initialver //-------------------------------------------------------------------- moduleEncoder ( input clk_in, //系统时钟 input rst_n_in, //系统复位,低有效 input key_a, //旋转编码器A管脚 input key_b, //旋转编码器B管脚 input key_ok, //旋转编码器D管脚 output reg Left_pulse, //左旋转脉冲输出 output reg Right_pulse, //右旋转脉冲输出 output OK_pulse //按动脉冲输出 ); localparam NUM_500US = 6_000; reg [12:0] cnt;//计数器周期为500us,控制键值采样频率 always@(posedgeclk_inornegedgerst_n_in)begin if(!rst_n_in)cnt<=0; elseif(cnt>=NUM_500US-1)cnt<=1'b0; elsecnt<=cnt+1'b1; end reg [5:0] cnt_20ms; reg key_a_r,key_a_r1; reg key_b_r,key_b_r1; reg key_ok_r; //针对A、B、D管脚分别做简单去抖操作, //如果对旋转编码器的要求比较高,建议现对旋转编码器的输出做严格的消抖处理后再来做旋转编码器的驱动 //对旋转编码器的输入缓存,消除亚稳态同时延时锁存 always@(posedgeclk_inornegedgerst_n_in)begin if(!rst_n_in)begin key_a_r <= 1'b1; key_a_r1 <= 1'b1; key_b_r <= 1'b1; key_b_r1 <= 1'b1; cnt_20ms <= 1'b1; key_ok_r <= 1'b1; endelseif(cnt==NUM_500US-1)begin key_a_r <= key_a; key_a_r1 <= key_a_r; key_b_r <= key_b; key_b_r1 <= key_b_r; if(cnt_20ms>=6'd40)begin //对于按键D信号还是采用20ms周期采样的方法,40*500us=20ms cnt_20ms<=6'd0; key_ok_r<=key_ok; endelsebegin cnt_20ms<=cnt_20ms+1'b1; key_ok_r<= key_ok_r; end end end reg key_ok_r1;//对按键D信号进行延时锁存 always@(posedgeclk_inornegedgerst_n_in)begin if(!rst_n_in)key_ok_r1<=1'b1; elsekey_ok_r1<=key_ok_r; end wire A_state =key_a_r1&&key_a_r&&key_a; //旋转编码器A信号高电平状态检测 wire B_state =key_b_r1&&key_b_r&&key_b; //旋转编码器B信号高电平状态检测 assign OK_pulse =key_ok_r1&&(!key_ok_r); //旋转编码器D信号下降沿检测 reg A_state_reg;//延时锁存 always@(posedgeclk_inornegedgerst_n_in)begin if(!rst_n_in)A_state_reg<=1'b1; elseA_state_reg<=A_state; end //旋转编码器A信号的上升沿和下降沿检测 wire A_pos =(!A_state_reg)&&A_state; wire A_neg =A_state_reg&&(!A_state); //通过旋转编码器A信号的边沿和B信号的电平状态的组合判断旋转编码器的操作,并输出对应的脉冲信号 always@(posedgeclk_inornegedgerst_n_in)begin if(!rst_n_in)begin Right_pulse<=1'b0; Left_pulse<=1'b0; endelsebegin if(A_pos&&B_state)Left_pulse<=1'b1; elseif(A_neg&&B_state)Right_pulse<=1'b1; elsebegin Right_pulse<=1'b0; Left_pulse<=1'b0; end end end endmodule
小结
本节主要为大家讲解了旋转编码器的工作原理及软件设计,需要大家掌握的同时自己创建工程,通过整个设计流程,生成FPGA配置文件加载测试。